The Effects of VSWR on Phase and Amplitude Errors
1. Objective
Products such as programmable attenuators, phase shifters and IQ modulators are used as amplitude and/or phase control devices in system applications. Phase and/or amplitude are either analog or digitally controlled. A key parameter of amplitude and phase control products is the ability to vary the amplitude and/or the phase of the device’s S21 transmission coefficient in a linear fashion. Each programmable device is calibrated and verified at the factory to specified accuracy. Calibration and verification is performed under matched 50O conditions at each port using Vector Network Analyzer (VNA). Under these conditions, by definition, the S21 measurement of the Device Under Test (DUT) is independent of its input and output reflections, S11 and S22 respectively. Because the VNA is a traceable and reproducible standard, customer can readily verify DUT’s factory calibration by VNA method. With DUT inserted in a system chain, the reflections of adjacent source and load components cause uncertainty in DUT’s measurement due to interaction with the DUT’s input and output reflection coefficients. This uncertainty mechanism is the basis for discrepancy between the factory calibration and the measurement of the DUT parameters when inserted in the system chain.
Objective of this Application Note is to characterize the uncertainty model and provide a simple method to estimate phase and amplitude uncertainty limits of a device inserted in the system chain. Further objective is to recommend steps to reduce the extent of the ambiguity and effectively improve the DUT accuracy by applying a simplified system correction calibration.
2. Uncertainty Model
Uncertainty limits associated with interaction of two adjacent reflections are characterized by following formulas readily derived from transmission line theory:
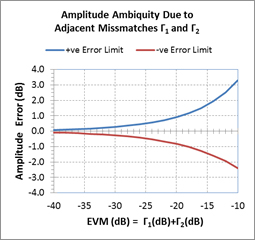
where ?1 and ?2 are adjacent complex reflection coefficients as measured on VNA or derived from components’ data sheets. Complex term (?1 ?2 ) changes with RF frequency and control state of the associated device. When the term has a real value, the amplitude error reaches its min/max values and conversely the phase error has min/max value when the term is imaginary. The amplitude I?1 ?2 I, i.e. ?1 (dB)+?2 (dB)
in log scale, represents the error vector magnitude (EVM). Charts in Figure 1 provide simple means to estimate the mismatch uncertainty.
 |
 |
| Figure 1a: Amplitude Error Limits |
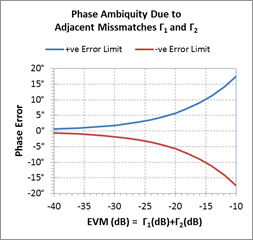
. Figure 1b: Phase Error Limits |
As an example, consider two adjacent ports, both having reflection of -9.5 dB (VSWR=2:1), nresulting in EVM=-19.0dB. From the Figure 1, error limits are +1.0/-0.9 dB and ± 6.4°. By reducing reflection of one of the ports to -20.8dB (VSWR=1.2:1), corresponding to EVM=-30.3dB, error limits reduce to ±0.3dB and ±1.8°. It should be emphasized that amplitude and phase errors are exclusive, namely at a frequency where amplitude error peaks, the phase error is minimal and vice versa.
Above examples has considered two adjacent port s only. When a device is inserted in the system chain between two reflective devices, one can intuitively identify several interactive reflection terms at play as depicted in Figure 2. The S21 parameter and associated S-parameters of the DUT are measured by VNA. Their magnitudes, as well as magnitudes of ?S and ?L are readily obtained from data sheets of the devices involved.
 Figure 2: Interacting reflections when a DUT is inserted between two reflective devices
Figure 2: Interacting reflections when a DUT is inserted between two reflective devices
The combined small signal is the resultant transmission coefficient. The rigorous formulae for and its 2nd order approximation are
image
Note that the 3rd tem can be omitted for active and/or high insertion loss or non-reciprocal devices, but should be included for low-loss reciprocal cases. Statistically it is unlikely that phase or magnitude of all terms will line-up at any given frequency. Therefore to estimate error limits of the inserted device, it is practical to combine the magnitudes of each error terms in rms (i.e. power) fashion, rather than add their magnitude directly.
image
As an example, consider reciprocal device having -2 dB insertion loss with -12dB typical reflections at input and output. Assume source and load reflections of -10dB and -14dB respectively, the combine rms error vector magnitude EMV, according to equation (3), is -19.8 dB. Applying this EVM value in Figure 1 charts, we can estimate the uncertainty limits as ±0.9dB and ±5.8°. In practical terms these values represent the reduced accuracy of the inserted device relative to its factory calibration.
3. Device Buffering and other Practical Considerations for Passive Models
Control units designed and manufactured by GMI are either purely passive or include active gain parts.
The passive model control units include:
- Models 19xxx - Continuously variable, current controlled, absorptive attenuators
- Models D19xxx - Continuously variable, voltage controlled, linearized absorptive attenuators
- Models 772xxx - Phase shifter/Frequency translator with digital /analog control
- Models 712xxx,112, 116, 121 - I.Q. Vector modulators with digital /analog controls
These passive models will exhibit changing VSWR over its attenuation or phase range. Such VSWR variation is an anticipated phenomenon and remains within the specified data sheet specification limits. As shown in above examples this will cause additionally undesirable phase and amplitude variations due to the imperfect VSWR of the adjacent system components. Alternatively, improved accuracy and variation can be realized by adding attenuators or isolators at input and/or output ports of the control device. This solution is very wideband and robust, however at the expense of some output power loss.
To improve the accuracy and reduce the variation, users recalibrate the inserted control device to create correction factors at each control state and frequency sub-bands as necessary. This is a time and memory intensive process. Alternative combined calibration process can be used with some performance limitations. With DUT initially calibrated at the factory, user is supplied with a memory mapping that correlates the correct digital control with the required amplitude or phase. Then the user calibrates the DUT in the system only at one of the states (e.g. zero state) over the operating frequency range. User then adds calibration data factory supplied memory mapping provided by the factory and computes the control for each required amplitude or phase value. The combined calibration process is ignoring the fact that for each different control (state or mode) of the DUT its output VSWR will be with a different value. The effect of changed output VSWR with non-ideal load VSWR reflected by the system will cause additional amplitude and phase errors.
4. Combined Calibration for Active Models
The active control units, such as ACM (Amplitude Control Unit) and APCM (Amplitude and Phase Control Unit) models include input and output amplifiers and band selection modes. Amplifiers act as a buffer between the changing VSWR of the attenuator or phase passive control unit and the load (system VSWR). Thus external input or output attenuator buffering is not required.
By using active control unit such as ACM or APCM a combined calibration method may be used. The ACM or APCM will be calibrated in the factory for the following conditions:
- Amplitude Step - 25 dB (0 to 60 dB)
- Phase Step - 5° (0 to 360°)
- Frequency Step - ~100 MHz (0.5-2GHz or 2-18GHz or 18-40GHz)
Upon request GMI will provide a full calibration file for each module. In the system the ACM and APCM may be calibrated only at “zero” state and all further states may be derived directly from the calibration files. System designer must be aware that if the system includes several modes with different VSWR, a control unit (ACM or APCM) will need a separate calibration for each mode.
By using this combined calibration method total system accuracy after calibration over frequency, attenuation, phase and time is expected to meet:
- Amplitude Accuracy - ±1 dB
- Phase Accuracy - ±2°
- Atten Dynamic Range - Standard ACM module can support 100 dB attenuation range
5.Output Power Enhancement
Wideband ACM and APCM models include an output filter bank to meet harmonic rejection requirements at higher input power levels. Application of the combined calibration method in Section 4 requires that ACM and APCM operate as a “linear device”. Added loss of the filter bank limits the output power linear region to bout 5-10 dB below the 1dB compression point.
In the case where user needs more output power, there are two solutions to consider:
- Remove the output filter bank, thus increasing output power by about 10dB with a significant degradation of harmonics levels.
- Increase the output power capabilities of the amplifier within the ACM or APCM as well as the power handling of the switched filter bank. This solution will maintain desirable harmonic rejection. On the downside, this approach considerably increases the design complexity (power consumption, heat dissipation and size) and the cost of the modules.
